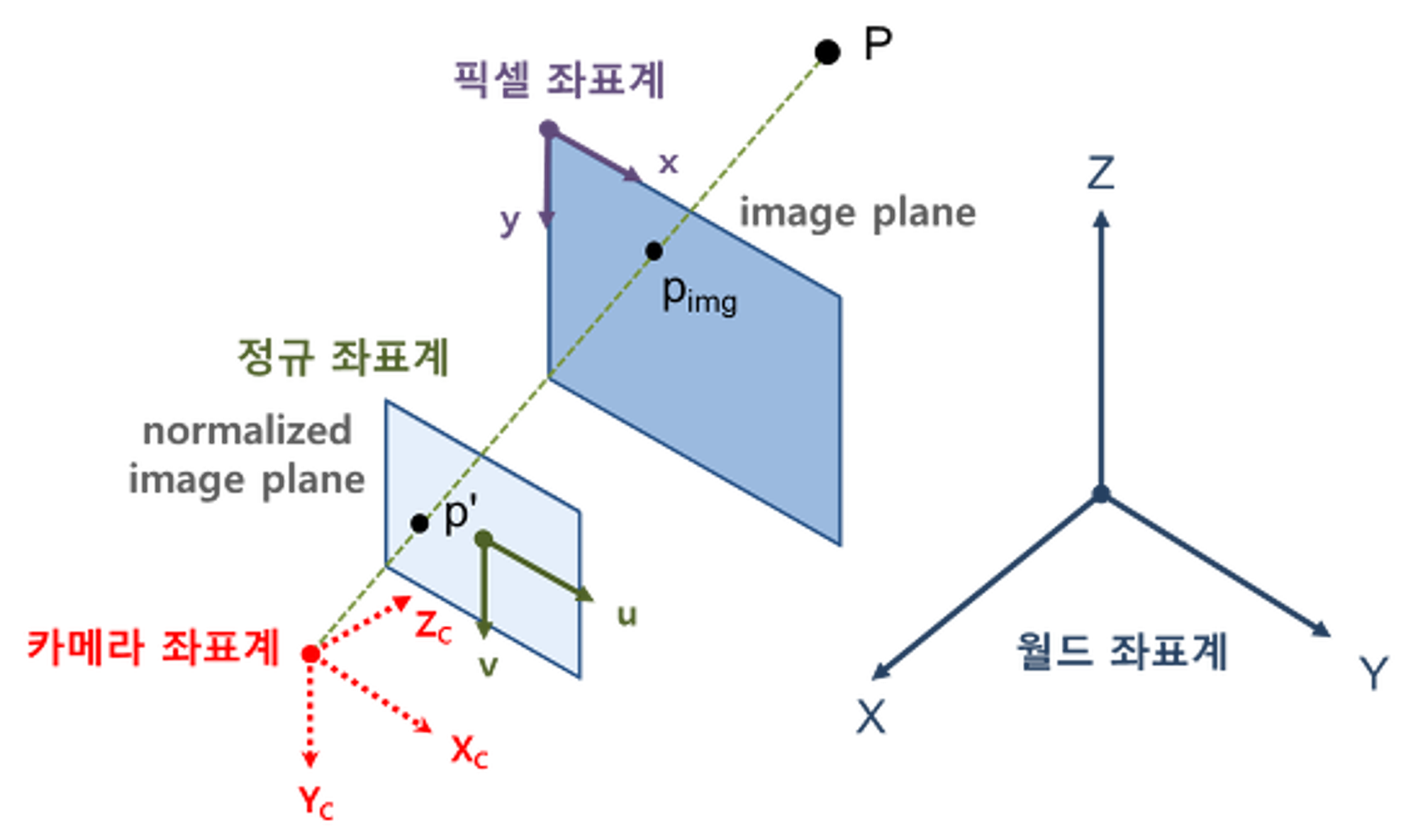
카메라 캘리브레이션은 카메라의 왜곡을 보정하고, 실제 세계에서의 3D 좌표를 이미지의 2D 좌표로 변환하는 작업 ⇒ 스테레오 비전과 같은 컴퓨터 비전 애플리케이션에서 매우 중요합니다.
왜곡의 종류
카메라 렌즈는 일반적으로 두 가지 주요 왜곡을 일으킵니다: 방사 왜곡(Radial Distortion)과 접선 왜곡(Tangential Distortion).
1. 방사 왜곡 (Radia Distortion):
- 방사 왜곡은 이미지의 중심에서 멀어질수록 직선이 휘어지는 현상입니다.
- 수학적으로, 방사 왜곡은 다음과 같이 표현됩니다:
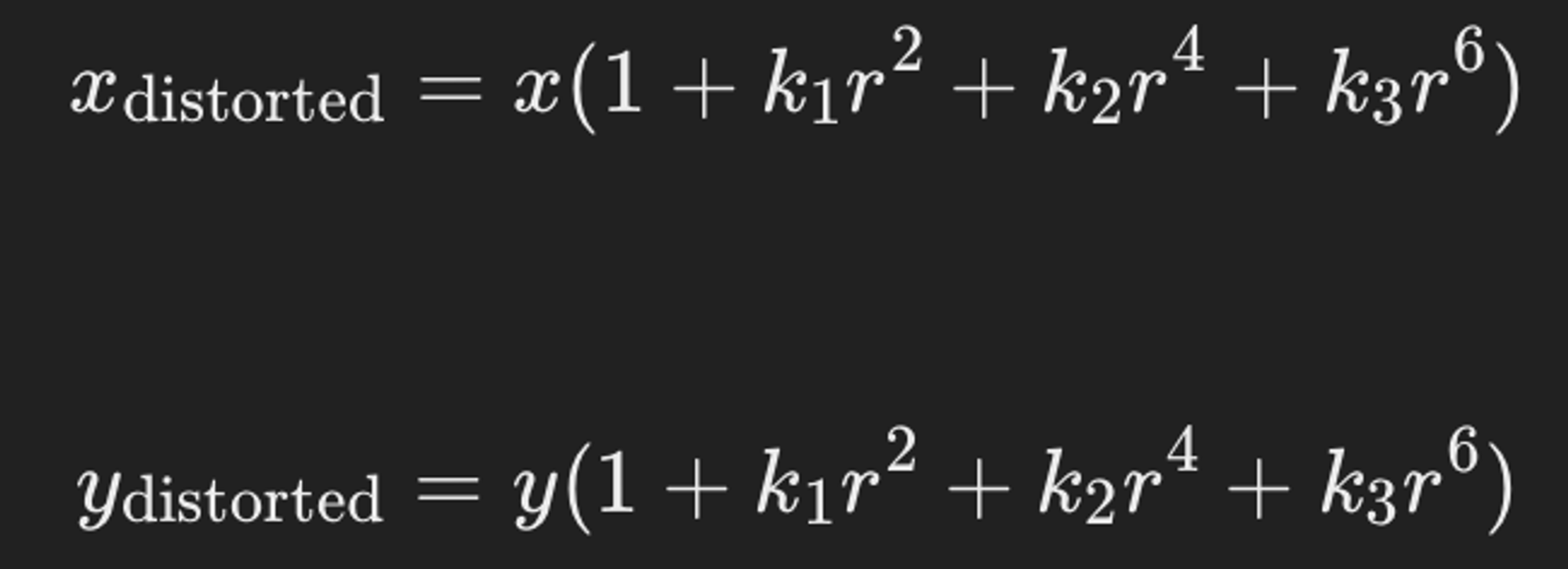
- 여기서 r은 점의 거리입니다.
2. 접선 왜곡(Tangential Distortion):
- 접선 왜곡은 렌즈가 이미지 평면에 완벽히 평행하지 않아 발생합니다.
- 수학적으로, 접선 왜곡은 다음과 같이 표현됩니다:

⇒ distortion coefficient = (k1, k2, p1, p2, k3)
내부 및 외부 매개변수
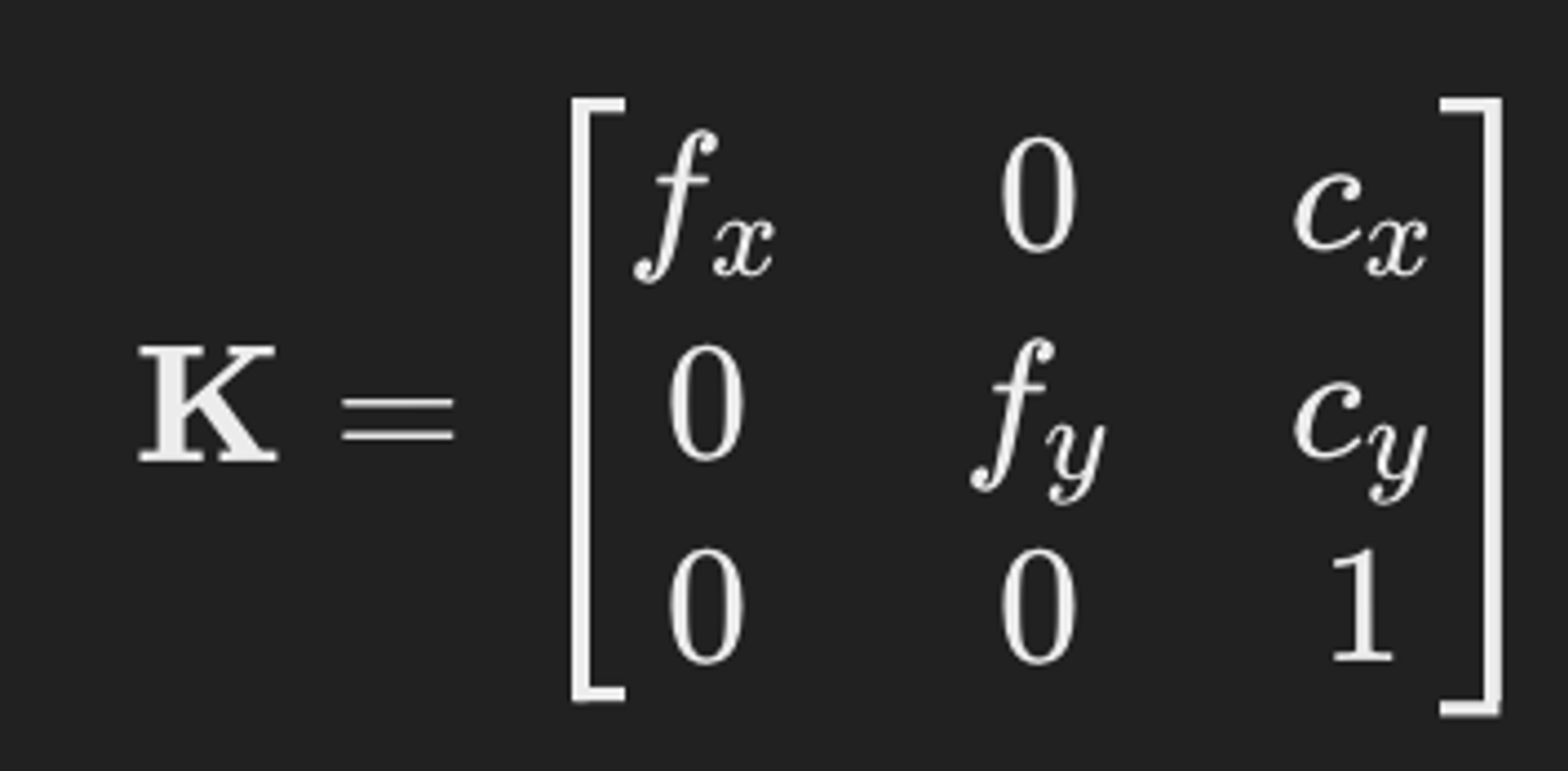
- 내부 매개변수(Intrinsic Parameters):
- 카메라 자체의 특성을 나타내며, 초점 거리(focal length)와 광학 중심(Principal Point) 등이 포함됩니다. (focal length fx, fy / optical centers cx, cy)
- 카메라 매트릭스로 표현됩니다:
- 외부 매개변수(Extrinsic Parameters):
- 카메라와 실제 세계 좌표계 사이의 변환을 나타내며, 회전 벡터와 평행 이동 벡터가 포함됩니다.
https://darkpgmr.tistory.com/32
https://darkpgmr.tistory.com/31

For stereo applications, these distortions need to be corrected first.
To find these parameters, we must provide some sample images of a well defined pattern
find some specific points of which we already know the relative positions (e.g. square corners in the chess board)
need at least 10 test patterns
=> 이 test pattern 을 활용한 연산을 수행하여 카메라의 왜곡을 보정하고, 실제 세계에서의 3D 좌표를 이미지의 2D 좌표로 변환할 수 있는 카메라 matrix + 왜곡 계수 를 파악할 수 있다
'etc' 카테고리의 다른 글
| 2025 겨울 가속기학교 - 딥러닝 추론 모델 병렬화/가속화 하기 (2) | 2025.03.01 |
|---|---|
| ffmpeg 이용해 여러 동영상을 동시에 재생 (격자) (0) | 2024.08.29 |
| pre-commit 이란? (0) | 2024.08.29 |
| git commit 관련 조작하기 (feat. lazygit) (0) | 2024.08.29 |
| github에는 못올리는 큰 파일 dvc로 관리하기 (0) | 2024.08.29 |